




 Qzone
Qzone
 微博
微博
 微信
微信


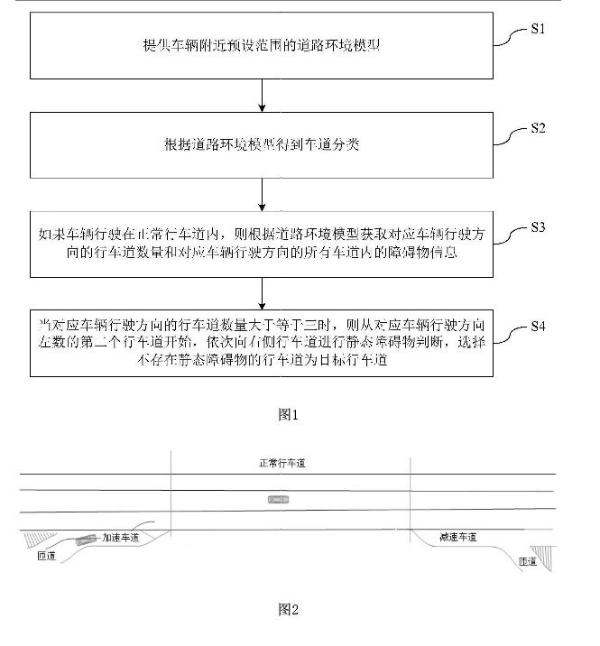
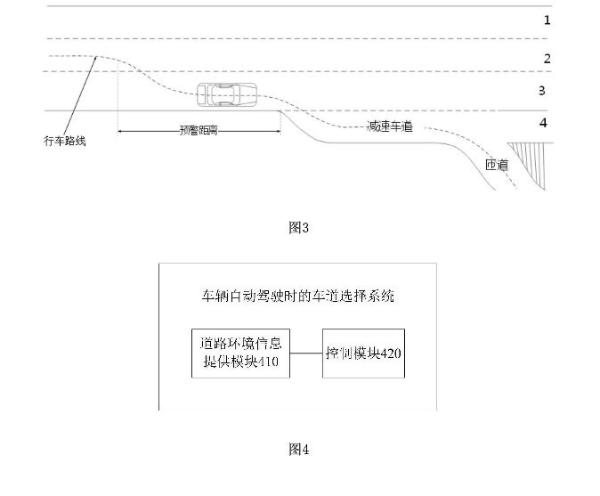
近日,长城汽车被授予一项自动驾驶相关专利,名为“车辆自动驾驶时的行车道选择方法、选择系统及车辆”,公开号为 CN110614995B,2018年12月29日申请,2021年1月22日公开。
本发明提供了一种车辆自动驾驶时的行车道选择方法、选择系统及车辆,该行车道选择方法包括:提供车辆附近预设范围的道路环境模型;根据道路环境模型得到车道分类,如果车辆行驶在正常行车道内,则获取正常行车内的车道数量;如果当前路段的车道数大于等于三时,则获取当前路段的所有车道内的障碍物信息;从正常行车道内左数的第二个行车道开始,依次向右侧行车道进行静态障碍物判断,选择不存在静态障碍物的行车道为目标行车道。
本发明可以根据车辆所处车道、车道数量和车道内障碍物选择目标车道,以便车辆自动驾驶时在选择的目标车道内行驶,保证通行的情况下使车辆以较快的速度行驶。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)





南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5505-24 17:55

TOM2022-05-24 17:5505-24 17:55

TOM2022-05-24 17:5505-24 17:55






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>


















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报